

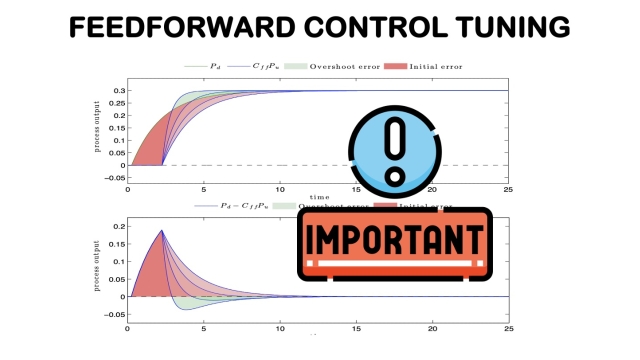
Advances in feedforward control for measurable disturbances
35 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More
Z-Transform - Practical Applications
26 min
Intermediate
Video
Application
Covering practical applications of the Z-transform used in digital signal processing, for example, stability analysis and frequency response of discrete-time systems. Theory, C code, and...
See More
Vibrational Control in Insect Flight
7 min
Intermediate
Video
Application
Abstract: It is generally accepted among biology and engineering communities that insects are unstable at hover. However, existing approaches that rely on direct averaging do not fully...
See More
Data-Driven Dynamical Systems Overview
21 min
Intermediate
Video
Theory
This video provides a high-level overview of this new series on data-driven dynamical systems. In particular, we explore the various challenges in modern dynamical systems, along with...
See More
System Identification: Koopman with Control
10 min
Intermediate
Video
Theory
This lecture provides an overview of the use of modern Koopman spectral theory for nonlinear control. In particular, we develop control in a coordinate system defined by eigenfunctions of...
See More
Why Choose Model-Based Reinforcement Learning?
15 min
Intermediate
Video
Theory
What is the difference between model-free and model-based reinforcement learning? Explore the differences and results as the learning models are applied to balancing a cart/pole system as an...
See More")
Koopman Spectral Analysis (Control)
15 min
Intermediate
Video
Theory
In this video, we explore extensions of Koopman theory for control systems. Much of the excitement and promise of Koopman operator theory is centered around the ability to represent...
See More
Why Digital Beamforming Is Useful for Radar
13 min
Intermediate
Video
Theory
Learn how you can use digital beamformers to improve the performance and functions of radar systems. The MATLAB Tech Talk series on radar covered how to use radar to determine range, range...
See More
Advances in feedforward control for measurable disturbances (in Spanish)
60 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More
Real-Time Software Implementation of Analog Filters
14 min
Intermediate
Video
Application
Modelling analog filters, discretisation, and implementation of the digitally-equivalent filters on a real-time, embedded system (STM32). Includes theory, DSP, firmware, and results.
See More
How Antennas Work
8 min
Intermediate
Video
Theory
Antennas constitute as a major component in various communication systems, signal transmission and many others. It is important to understand how they work and create propagating waves in...
See More
Wind Tunnel Testing: Introduction and Data Acquisition
28 min
Intermediate
Video
Theory
This is the first of our 3 part series on wind tunnel testing. In this video, we introduce the concept of wind tunnel testing as well as discuss the process for acquiring aerodynamic data in...
See More
How I put the Google Maps Algorithm on my Autonomous Drone
13 min
Intermediate
Video
Application
This fully autonomous drone has an onboard computer ‘brain’, camera ‘eyes’, and an algorithm that generates the fastest path around unknown obstacles as they’re detected mid-flight. Let’s...
See More
System Identification: Full-State Models with Control
10 min
Intermediate
Video
Theory
This lecture provides an overview of modern data-driven regression methods for linear and nonlinear system identification, based on the dynamic mode decomposition (DMD), Koopman theory, and...
See More
Learning Dynamic Systems & Control Engineering with a Video Game
Intermediate
Video
Demonstration
Engineering Students at Northern Illinois University are learning one of their core subjects, Dynamic Systems & Control, with the aid of a video game.
See More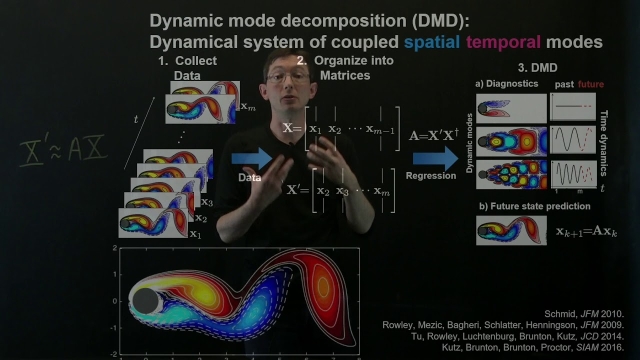
Dynamic Mode Decomposition (Overview)
18 min
Intermediate
Video
Theory
In this video, we introduce the dynamic mode decomposition (DMD), a recent technique to extract spatio-temporal coherent structures directly from high-dimensional data. DMD has been widely...
See More![Principal Component Analysis (PCA) 2 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_494.jpg?itok=Q2x6S-Uj "Principal Component Analysis (PCA) 2 [Python]")
Principal Component Analysis (PCA) 2 [Python]
7 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for principal component analysis (PCA) in Python (part 2).
See More
Wind Tunnel Data Analysis and Testing Considerations
111 min
Intermediate
Video
Theory
This is the last video in our 3 part series on wind tunnel testing. In this video, we discuss what typical plots of wind tunnel data might look like and how to extract relevant information...
See More
Bridging the Gap: Using Real World Problems to Unveil Deep Control Principle...
52 min
Intermediate
Video
Application
This is a plenary lecture given at the 2020 IEEE Conference on Control Systems Technology, Montreal, Canada, August 24-26, 2020. There is no paper, but this is the video of the talk.
See More
Why the Riccati Equation Is important for LQR Control
14 min
Intermediate
Video
Theory
This Tech Talk looks at an optimal controller called linear quadratic regulator, or LQR, and shows why the Riccati equation plays such an important role in solving it efficiently. The talk...
See More
System Identification: Dynamic Mode Decomposition with Control
11 min
Intermediate
Video
Theory
This lecture provides an overview of dynamic mode decomposition with control (DMDc) for full-state system identification. DMDc is a least-squares regression technique based on the singular...
See More
Advanced process control (APC): Theory & Applications in SAGD
Intermediate
Video
Theory
This webinar is presented by Thiago Avila and covers what APC is, why we do it, examples of APC in the SAGD industry, what optimization opportunities are available, and where this technology...
See More
Nathan Kutz:"Data-driven Discovery of Governing Physical Laws"
73 min
Intermediate
Video
Theory
Seminar by Dr.Nathan Kutz on "Data-driven Discovery of Governing Physical Laws" on 10/31/2018 CICS Seminar Series
See More
Projectile Motion Practice Problems
28 min
Intermediate
Video
Application
In this video, practice along questions on an important topic of Kinematics i.e Projectile Motion. Practicing would help you remember the concepts and also understand them better.
See More")
Koopman Spectral Analysis (Continuous Spectrum)
12 min
Intermediate
Video
Theory
In this video, we discuss how to use Koopman theory for dynamical systems with a continuous eigenvalue spectrum. These systems are quite common, such as a pendulum, where the period...
See More